
TOKYO-Mitsui OSK Lines, Ltd. (MOL; Presidente y CEO: Takeshi Hashimoto) anunció hoy que, junto con las dos empresas de su grupo y los siguientes socios del consorcio, han concluido con éxito la primera prueba en el mar del mundo de la operación de un barco no tripulado de puerto a puerto (salida puerto: puerto de Tsuruga en la prefectura de Fukui, puerto de llegada: puerto de Sakai en la prefectura de Tottori) los días 24 y 25 de enero, como parte del proyecto de barco no tripulado MEGURI2040 (Nota 1) dirigido por The Nippon Foundation.

Los siguientes dos puntos son características principales del papel del consorcio en los proyectos de operación de barcos no tripulados MEGURI2040:
(1) El consorcio realizó la prueba en el mar con dos tipos diferentes de barcos: un portacontenedores costero y un transbordador costero para automóviles, con el fin de utilizar los resultados para desarrollar tecnologías versátiles mediante la identificación de similitudes y diferencias entre los dos tipos de barcos.
(2) Realizó pruebas de amarre utilizando un dron en un movimiento hacia la operación de amarre automatizado.
Desde el inicio de MEGURI2040 en 2020, el consorcio ha llevado a cabo varios experimentos elementales para realizar operaciones autónomas de barcos. En octubre de 2021, MOL Marine & Engineering Co., Ltd. realizó una prueba de verificación de seguridad utilizando su propio simulador 3D antes de esta prueba en el mar.
(Miembros del consorcio y sus funciones principales)
| Nombre de empresa | Funciones principales |
|---|---|
| mol | Coordinación general, evaluación de riesgos |
| Mitsui E&S Shipbuilding Co., Ltd. (MES-S; Presidente: Isamu Funazu, Sede: Chuo-ku, Tokio) | Desarrollo de funciones de “Juicio” y “Operación del buque” (Ruteo automatizado para evitar colisiones, operación automatizada del buque en puerto, operación automatizada de atraque/desatraque) |
| Furuno Electric Co., Ltd. (Presidente: Yukio Furuno; Sede: Nishinomiya-shi, Prefectura de Hyogo) | Desarrollo de la función “Cognitiva” (Integración de información de sensores durante la navegación y en el atraque) |
| Imoto Lines, Ltd. (Presidente: Takayuki Imoto; Sede: Kobe-shi, Prefectura de Hyogo) | Proporcione un barco de prueba y gente de mar, desarrolle un plan de operación del barco. |
| ALI Technologies, Inc. (ALI; Presidente: Daisuke Katano; Sede: Minato-ku, Tokio) | Desarrollo de tecnología de apoyo al amarre (Lanzamiento de una línea de vaivén desde el barco hasta el muelle mediante un dron no tripulado) |
| MOL Ferry Co., Ltd. (Presidente: Naotoshi Omoto; Sede: Chiyoda-ku, Tokio) | Proporcione un barco de prueba y gente de mar, desarrolle un plan de operación del barco. |
| MOL Marine & Engineering Co., Ltd. (Presidente: Takashi Nakajima; Sede: Minato-ku, Tokio) | Cree un programa de simulación de navegación/atraque/desatraque para evitar colisiones para probar la función automatizada de esa escena. |
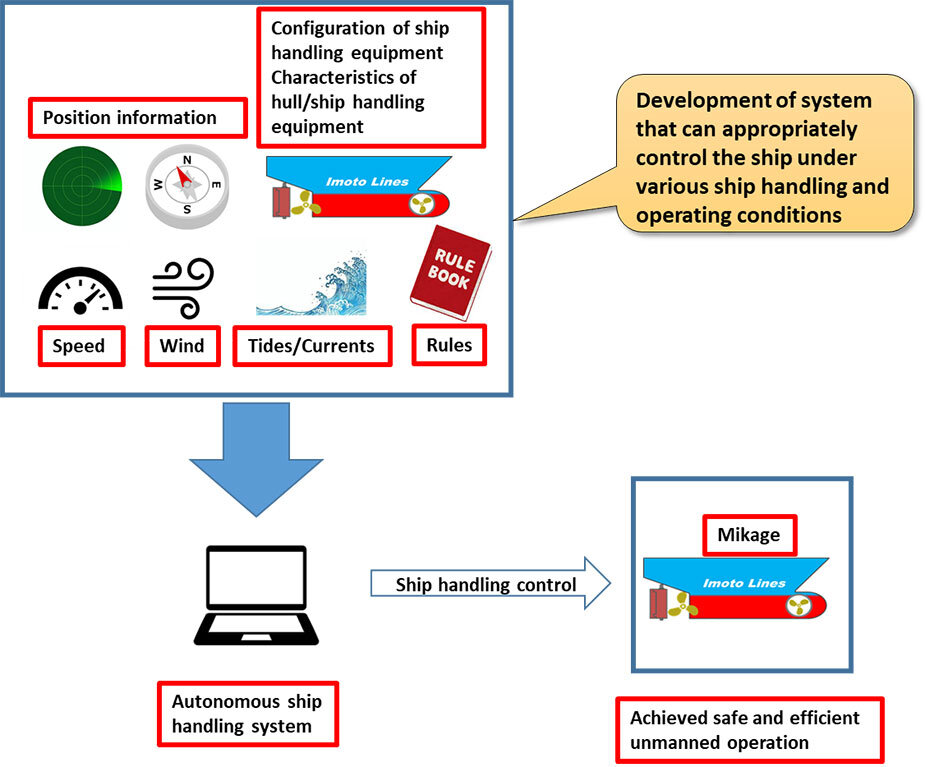
Para la navegación autónoma, los barcos siguieron una ruta previamente formulada utilizando el sistema de control de operación de barcos autónomos desarrollado por MES-S, considerando los siguientes elementos.
- Captar con precisión la información de ubicación del barco
- Diversos elementos externos como el viento y las mareas/corrientes
- Rendimiento de manejo de barcos específico para cada barco (maniobrabilidad, condiciones de aceleración y desaceleración)/configuración del equipo de manejo de barcos
- Normas de navegación aplicadas a los buques
La información sobre otros barcos y obstáculos/escombros en la ruta establecida fue recopilada por el sistema autónomo de integración de información circundante desarrollado por Furuno Electric (mide y muestra posiciones, velocidad, tipos de barcos cercanos y posición de obstáculos/escombros mediante la integración de información obtenida por cognición a través de imágenes de radar, AIS y cámaras). Según la información integrada, el barco navegó por la ruta segura formulada por el sistema autónomo de rutas para evitar colisiones.
El atraque y desatraque autónomos requieren un manejo especialmente delicado, por lo que el barco atracó y desatracó usando información del sensor de soporte de atraque/desatraque desarrollado por Furuno Electric (equipo que calcula y muestra visualmente distancias relativas precisas y ángulos relativos entre el muelle y el casco a partir de la información recopilada por LiDAR/cámara/brújula satelital).
El “amarre automatizado” es un elemento del proyecto del consorcio. Normalmente, un miembro de la tripulación en el barco pasa la línea de elevación (para amarrar el barco en el puerto) arrojándosela a un trabajador en el muelle. En esta prueba de mar, el dron de vuelo automático desarrollado por ALI llevó la línea hasta el muelle. A medida que la tecnología avance en el futuro, se espera que esto se convierta en un enfoque alternativo a las operaciones de amarre, que es una gran carga para la gente de mar.
Con el fin de desarrollar tecnologías altamente versátiles, el consorcio planea una prueba en el mar de navegación autónoma utilizando el ferry costero ” Sunflower Shiretoko “, que tiene características diferentes a los portacontenedores costeros.
(Plan para futuras pruebas de mar)
| Barco | tipo de barco | Ruta de prueba de mar | Calendario |
|---|---|---|---|
| Girasol Shiretoko (propiedad de MOL Ferry) | Transbordador costero | De Tomakomai a Oarai | febrero 2022 |
El consorcio tiene como objetivo continuo reducir la carga de trabajo de la gente de mar y garantizar un tráfico marítimo seguro a través de las iniciativas MEGURI2040 para realizar una navegación autónoma.
Mitsui O.S.K. Lines, Ltd.








{kind=link}